Fifth progress presentation
Vegard Bergsvik Øvstegård
Fri - 13 Nov 2020
Days until delivery: 109 days
GIL-UAV
GPS-Independent Localization for UAVs
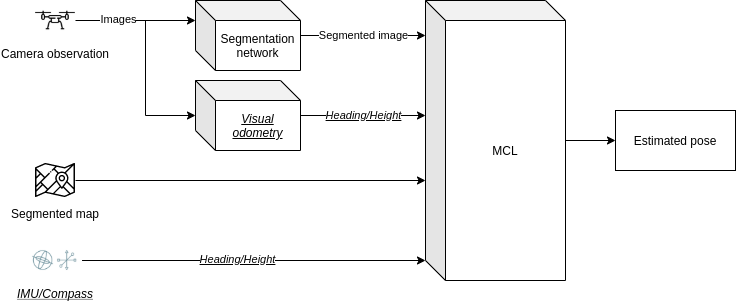
Framework simulation
Status from previous progress presentation
| Task | Progress |
|---|---|
| In progress: | |
| 1. Tune the U-net | |
| 2. Acquire & improve Dataset* | |
| 3. Train the U-net* | |
| To do: | |
| 4. Get drone footage | |
| 5. Implement framework(C++, SIMD, CUDA) | |
| Completed | |
| Code dataset-producing software |
Updated tasks* New tasks**
Updated tasks
| Task | Progress |
|---|---|
| 4. Get drone footage | |
| 5. Implement framework(C++, SIMD, CUDA) | |
| 5. Report writing |
Get drone footage
- A1/A2/A3 drone licence
- A2 is not free of charge..
- Footage of different environments:
- Snow
- No leafs
- Rain
Implement framework
- Acquired Nvidia Jetson Nano and Nvidia Jets Tegra TX1.
- Started coding project in C++.
Current status and progress
| Task | Progress |
|---|---|
| In progress: | |
| 1. Tune the U-net | |
| 2. Acquire & improve Dataset | |
| 3. Train the U-net | |
| 4. Get drone footage* | |
| 5. Implement framework(C++, SIMD, CUDA)* | |
| 5. Report writing* | |
| To do: | |
| 6. Create test-set from drone footage** | |
| 7. Test segmentation on Nvidia boards** |
Updated tasks* New tasks**
Completed tasks
- Code dataset-producing software
- Create U-net (PyTorch, multi-GPU)
- Implement naive MCL algorithm (Python)
- Get hardware (nVIDIA Jetson TX1 & Jetson Nano)
Plan for the next fortnight:
| Week 5 | Week 6 |
|---|---|
| Test segmentation on Nvidia Boards | Get more drone footage |
| Develop further on MCL C++ implementation | Write more on report. |
| Acquire & improve Dataset | Write loads more on the report. |