Third progress presentation
Vegard Bergsvik Øvstegård
Fri - 13 Nov 2020
Days until delivery: 186 days
GIL-UAV
GPS-Independent Localization for UAVs
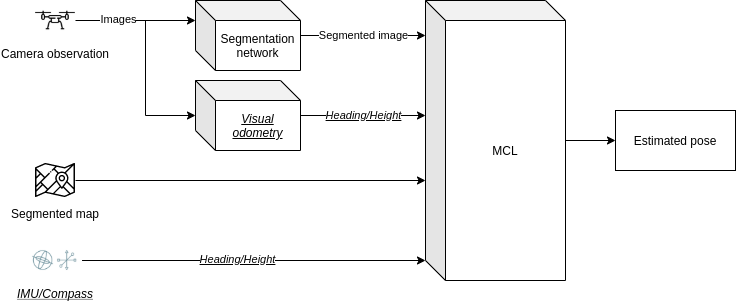
Framework simulation
Status from previous progress presentation
| Task | Progress |
|---|---|
| In progress: | |
| 1. Tune the U-net** | |
| 2. Acquire & improve Dataset* | |
| 3. Train the U-net* | |
| To do: | |
| 4. Code dataset-producing software | |
| 5. Get drone footage | |
| 6. Implement framework(C++, SIMD, CUDA) | |
| Completed | |
| Create U-net (PyTorch, multi-GPU)* |
Updated tasks* New tasks**
Updated tasks
| Task | Progress |
|---|---|
| 2. Acquire & improve Dataset | |
| 3. Train the U-net | |
| 4. Code dataset-producing software |
Acquire & improve Dataset
- Orthophotos:
- Location: Norway
- Year taken: 2018-2020
- Ca 64 map-tiles.
- Spanning over 200$ km^2$
- Classes:
- Buildings
- Water bodies
- Background
DS Version 0.0.1:
- 25,1Gb of data
- 67219 samples
- Issues:
- Poor building annotations due to rectification
- Missing annotations on some buildings
- Very inaccurate water annotations
DS Bump to Version 0.1.0:
- Improvements:
- Removed sets with images out of bounds from aerial photos.
- Removed sets containing only background class.
- Removed sets containing only water bodies class.
- 17,4Gb of data
- 43802 samples
- Class balance:
- Building percentage: 24 %
- Water pixels: 6 %
- Background pixels: 69 %
Code dataset-producing software
Features:
- Automated extraction of ground truth labels from vector maps.
- Generates datasets from orthophotos and GT images.
- Discards (some)noisy sets.
- Produces dataset statistics
- Class balance
- Mean
- Standard deviation
Backlog:
- Remove sets with non-annotated buildings.
Train the U-net
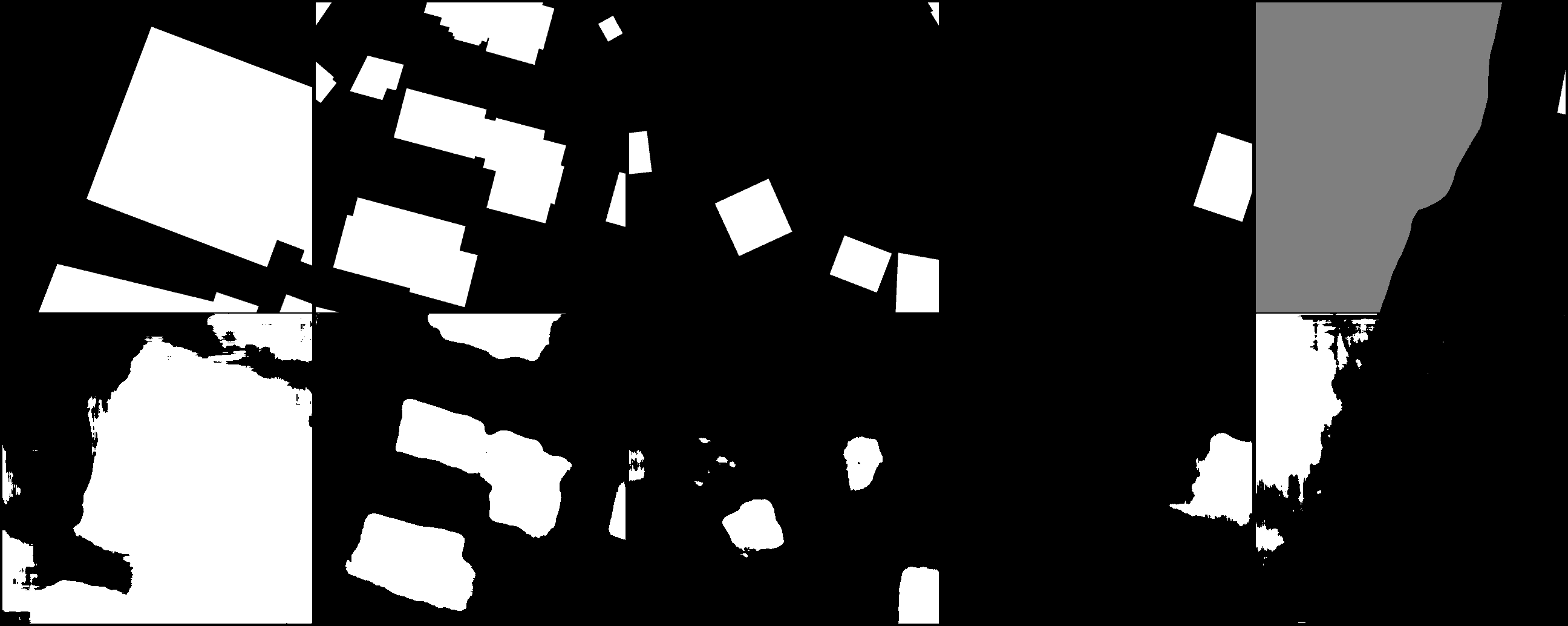
Test set example from newest dataset:

Train the U-net
Current status and progress
| Task | Progress |
|---|---|
| In progress: | |
| 1. Tune the U-net | |
| 2. Acquire & improve Dataset* | |
| 3. Train the U-net* | |
| To do: | |
| 4. Get drone footage | |
| 5. Implement framework(C++, SIMD, CUDA) | |
| Completed | |
| Code dataset-producing software |
Updated tasks* New tasks**
Completed tasks
- Code dataset-producing software
- Create U-net (PyTorch, multi-GPU)
- Implement naive MCL algorithm (Python)
- Get hardware (nVIDIA Jetson TX1)
Plan for the next fortnight:
| Week 47 | Week 48 |
|---|---|
| Tune and train the U-net | Port MCL code from Python to C++ |
| Get drone footage | Get drone footage |
| Acquire & improve Dataset | Create orthophotos from drone footage |