Second progress presentation
Vegard Bergsvik Øvstegård
Fri - 16 Oct 2020
Days until delivery: 214 days
GIL-UAV
GPS-Independent Localization for UAVs
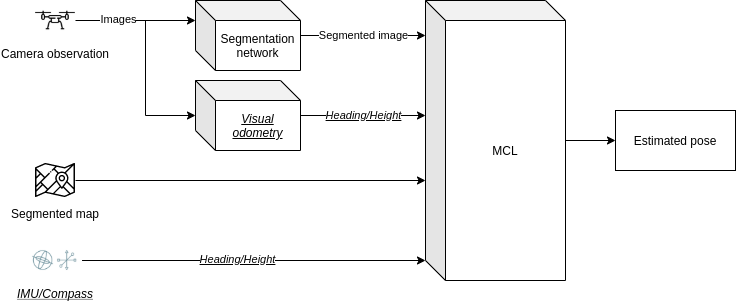
Framework simulation
Status from previous progress presentation
| Task | Progress |
|---|---|
| In progress: | |
| 1. Create U-net (PyTorch, multi-GPU) | |
| 2. Acquire & improve Dataset | |
| To do: | |
| 3. Train the U-net | |
| 4. Code dataset-producing software | |
| 5. Get drone footage | |
| 6. Implement framework(C++, SIMD, CUDA) | |
| Completed | |
| Implement naive MCL algorithm (Python) | |
| Get hardware (nVIDIA Jetson TX1) |
Updated tasks
| Task | Progress |
|---|---|
| 1. Create U-net (PyTorch, multi-GPU) | |
| 2. Acquire & improve Dataset | |
| 3. Train the U-net |
Create U-net (PyTorch, multi-GPU)
- Base model and framework implemented with PyTorch and PyTorch Ignite
- Features:
- Gradient clipping
- Gradient accumulation
- Early stopping
- Metrics
- Distributed data parallel(DDP)
- Multi GPU training
- Training notification(Discord)
- Learning rate scheduler (ReduceLROnPlateau)
- Rescaling of images.
Create U-net (PyTorch, multi-GPU)
- Features:
- Data augmentation for training(All are random to some degree):
- Contrast
- Brightness
- Saturation
- Noise; Gaussian, Salt & Pepper, Poission, Speckle.
- Rotations(
$$n*\frac{pi}{2}$$
) - Vertical and Horisontal flips.
- Data augmentation for training(All are random to some degree):
Acquire & improve Dataset
- Extracted larger aerial photographs from existing data, of which will aid in expanding the dataset by several images.
- Fine-tuned the ground truth segmentation images as they where not overlapping buildings enough.
- Have finally gotten access to Kartverkets database:
Acquire & improve Dataset
Resultsnotes:
- Ground truth is far from perfect even after fine-tuning. This does yield noise in the dataset, witch may lead to the following cases:
- NEGATIVE: Learning gets corrupted and a suitable global optimum may never occur.
- POSITIVE: Noise may induce better generalization for the network.
- Real life scenarios contain occlusions in the images, and network may learn to draw buildings as squares despite say occluding trees.
Train the U-net
- Attained several good preliminary results despite the network not being tuned and with a lacking dataset.
- Somewhat sceptical to the results. Test and validation data is completely separate, but they are very similar. I assume images from example drone-footage will not be as good.
- Results look like overfitting, but no indications of it from metrics.
Train the U-net
 Segmented buildings masked in white to the right.
Segmented buildings masked in white to the right.
Train the U-net
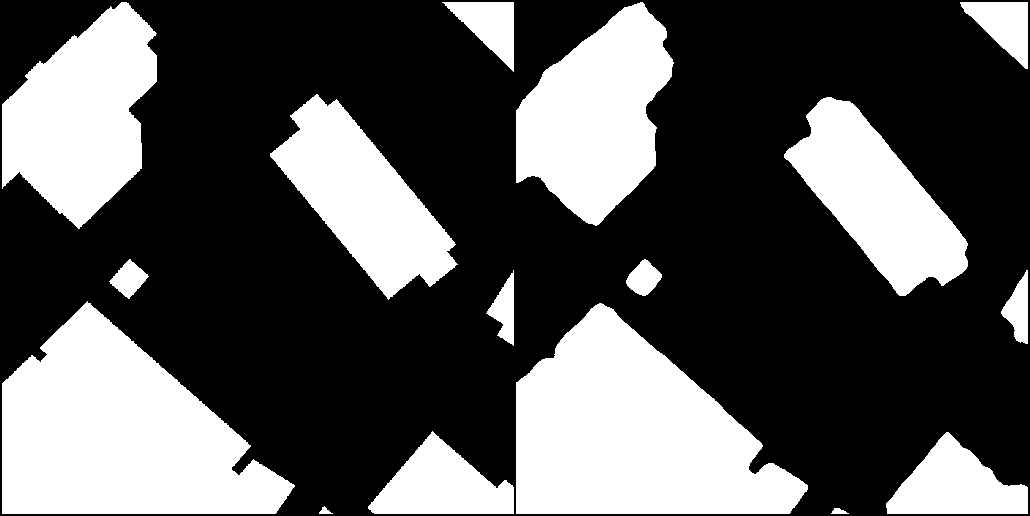 Ground truth left and prediction right.
Ground truth left and prediction right.
Train the U-net
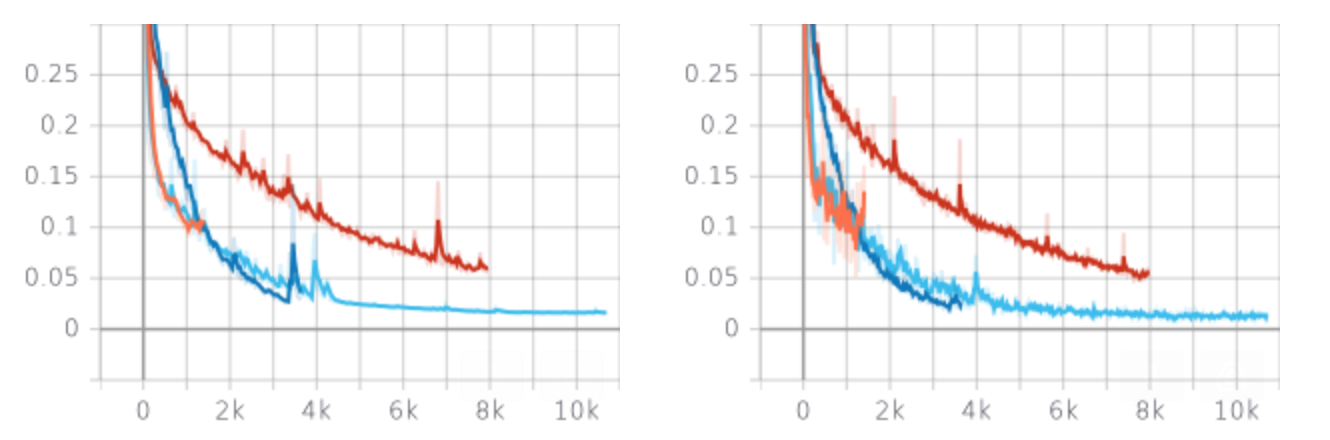
Training rounds left, validation rounds right.
No indications of overfitting. Light blue had learning-rate of 0.001. Metric is Binary Cross Entropy with Logits(BCEWithLogitsLoss).
Train the U-net
Resultsnotes:
- Results appear to be overfitting, however without indications in metrics.
- Image resolution plays a big part, 512x512px images gave far better results then 256x256px.
- I am considering increasing image size further, how ever this will affect batch-size and memory usage on GPUs.
- To much variation and randomness in data augmentation is disruptive for training. I.e to much noise results in no training(Duh).
- Considering adding elastic transformations to data-augmentation as not all buildings are square.
- Also considering adding grayscale transformations as the network appears to find red-bricked roof-tops much faster than any other. This might aid in a better global optimum.
Current status and progress
| Task | Progress |
|---|---|
| In progress: | |
| 1. Tune the U-net** | |
| 2. Acquire & improve Dataset* | |
| 3. Train the U-net* | |
| To do: | |
| 4. Code dataset-producing software | |
| 5. Get drone footage | |
| 6. Implement framework(C++, SIMD, CUDA) | |
| Completed | |
| Create U-net (PyTorch, multi-GPU)* |
Updated tasks* New tasks**
Completed tasks
- Create U-net (PyTorch, multi-GPU)
- Implement naive MCL algorithm (Python)
- Get hardware (nVIDIA Jetson TX1)
Plan for the next fortnight:
| Week 43 | Week 44 |
|---|---|
| Tune and train the U-net | Tune and train the U-net |
| Acquire & improve Dataset | Get drone footage |
| Update master thesis with current results and findings | Create orthophoto maps from drone-footage |