First progress presentation
Vegard Bergsvik Øvstegård
Fri - 18 Sep 2020
Days until delivery: 245 days
GIL-UAV
GPS-Independent Localization for UAVs
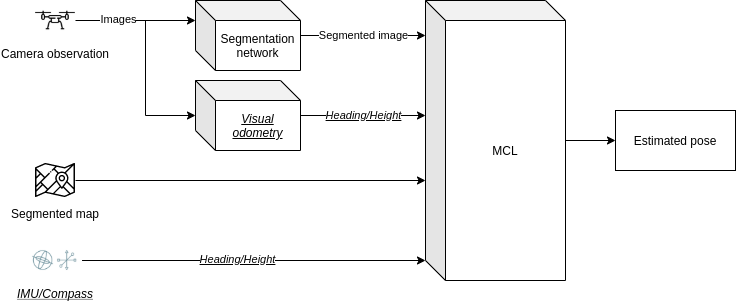
Framework simulation
Current status
| Task | Progress |
|---|---|
| In progress: | |
| 1. Create U-net (PyTorch, multi-GPU) | |
| 2. Acquire & improve Dataset | |
| To do: | |
| 3. Train the U-net | |
| 4. Code dataset-producing software | |
| 5. Get drone footage | |
| 6. Implement framework(C++, SIMD, CUDA) | |
| Completed | |
| Implement naive MCL algorithm (Python) | |
| Get hardware (nVIDIA Jetson TX1) |
Current results
- MCL simulation with current measurement model works like a charm.
- This is given a perfect segmentation, which will not occur IRL.
Plan for the next fortnight:
| Week 39 | Week 40 |
|---|---|
| Finish U-net code | Code dataset-producing software |
| Acquire & improve Dataset | Start framework implementation |
| Train the U-net | Get drone footage |
| Get drone footage |